參考資料:
1. Raspberry專案實作大全_02初試樹莓派
2. ITREAD01_在樹莓派上安裝ROS
3. 知乎_单独安装navigation問題解決方式
4. 艾鍗學院_子卡介紹
• ROS Pi image燒錄
參考步驟:
1.格式化記憶卡
SD Memory Card Formatter
2.將作業系統燒錄進記憶卡中
下載Etcher或USB Image Tool或Win32 Disk Imager
燒錄raspbian或noobs
我只有用noobs成功@@
參考: https://sites.google.com/site/raspberypishare0918/home/di-yi-ci-qi-dong/noobs-an-zhuang
3.將記憶卡從電腦上卸載,並插上樹莓派使用:
---圖片擷取自 簡書
樹莓派插電接螢幕跟鍵盤可以看到"raspi-config設定介面"就表示啟動成功~若沒出現就手動開啟命令終端圖示,或Ctrl+Alt+t,輸入以下命令:sudo raspi-config
i. 擴展檔案系統
ii. 修改帳戶/密碼
iii. 選擇scratch程式介面,或你想選其他的
iv. 國際化設定:若你想用中文選zh_TW但可能會遇到亂碼/時間預設是英國要改選台北/鍵盤配置也是預設英式要改選Generic 105--key(IntI)PC>English(US)>系統預設
v. 開啟樹莓派攝影機
vi. 不要加入IP位址到全球地圖,或你94想加
vii. 超頻:目前不用增加動力
viii. 進階設定:建議開啟遠端SSH登入
ix. 關於
設定完成後,就會進入到 Linux 的 Shell 環境了
打上startx就會登入圖形介面,安全關機指令可以用 sudo halt 但我用noobs開機後,開始設定的畫面跟以上的排列不一樣,但基本上就是設定以上那些~不用step by step 也能完成。
但我用noobs開機後,開始設定的畫面跟以上的排列不一樣,但基本上就是設定以上那些~不用step by step 也能完成。
• Pi I/O 子卡功能介紹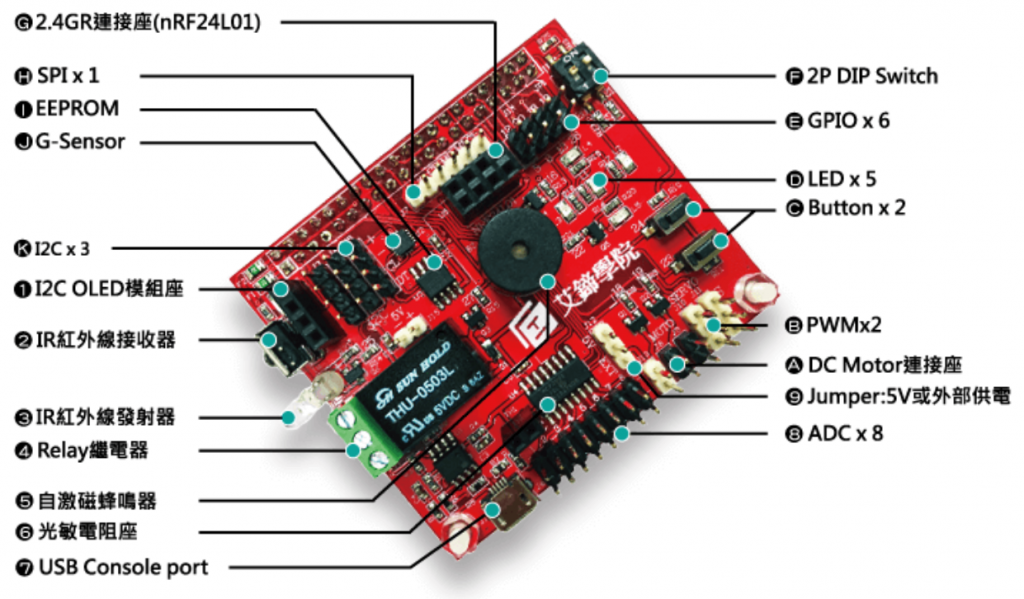
 我目前是沒有買啦XD
我目前是沒有買啦XD
• ROS節點設計:I/O控制、感測器讀取
學習樹莓派_GPIO 或者通過Raspberry Pi上訪問(打開終端窗口並運行命令): pinout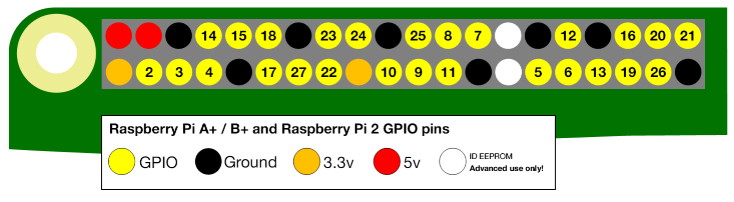
除了簡單的輸入和輸出設備外,GPIO引腳還可以使用多種替代功能,一些可用於所有引腳,另一些則可用於特定引腳。
○ PWM(脈衝寬度調製)
所有引腳均提供軟件PWM
硬件PWM可在GPIO12,GPIO13,GPIO18,GPIO19上使用
○ SPI
SPI0:MOSI(GPIO10); MISO(GPIO9); SCLK(GPIO11); CE0(GPIO8),CE1(GPIO7)
SPI1:MOSI(GPIO20); MISO(GPIO19); SCLK(GPIO21); CE0(GPIO18); CE1(GPIO17); CE2(GPIO16)
○ I2C
數據:(GPIO2); 時鐘(GPIO3)
EEPROM數據:(GPIO0); EEPROM時鐘(GPIO1)
○ 串行
TX(GPIO14); RX(GPIO15)
#基本感測器的玩法也不需要用到高級的樹莓派來練吧XD但你還是想測的話~
分享一個覺得介紹不算淺的投影片 https://www.slideshare.net/itembedded/raspberry-pi-io-127951929
• ROS遠端監控(Ubuntu Raspberry Pi 3)
參考:raspberry pi3B+ 從刷系統到安裝ros1.0-kinetic+遠端連線pc+除錯turtlebot
 我的情況是:有網路線(也有wifi)、有螢幕、有鍵盤
我的情況是:有網路線(也有wifi)、有螢幕、有鍵盤
開啟終端後首先打上$ ifconfig 找到wlan0那邊
紀錄下inet、netmask、broadcast那行,然後$ sudo nano /etc/network/interfaces
打上以下這些: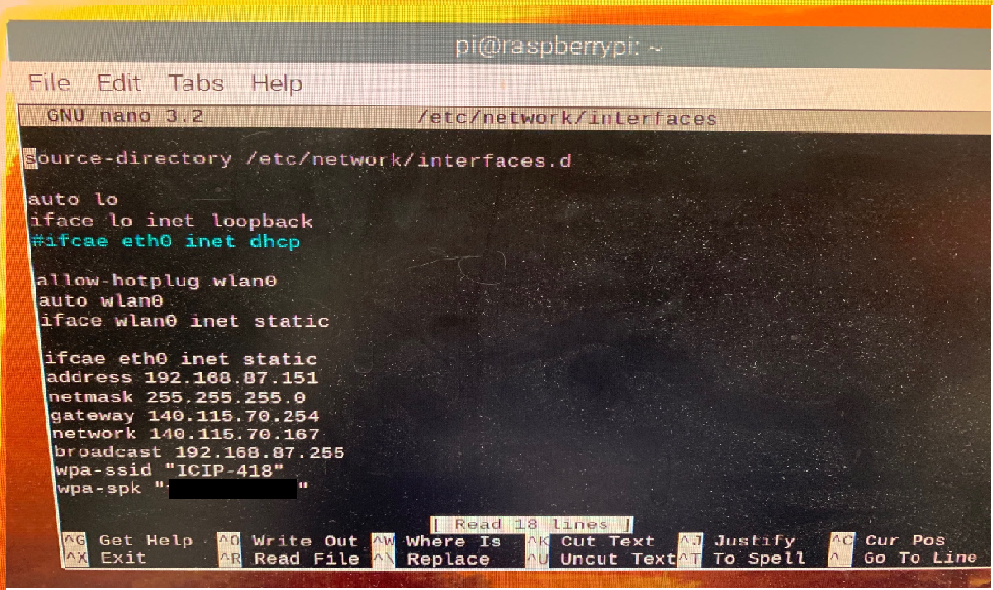
備註:
'''變更介面卡選項>IPv4>內容>
IP位址那行填入address
遮罩就是mask
預設閘道那行就是gateway'''
'''ICIP-418是我這wifi名稱,不是要照打的'''
打完之後,儲存是ctrl+O,離開是ctrl+x$ sudo /etc/init.d/networking restart
跑出來是[ OK ]...就表示成功!
下一步來開啟我們的SSH吧~$service ssh start$service ssh status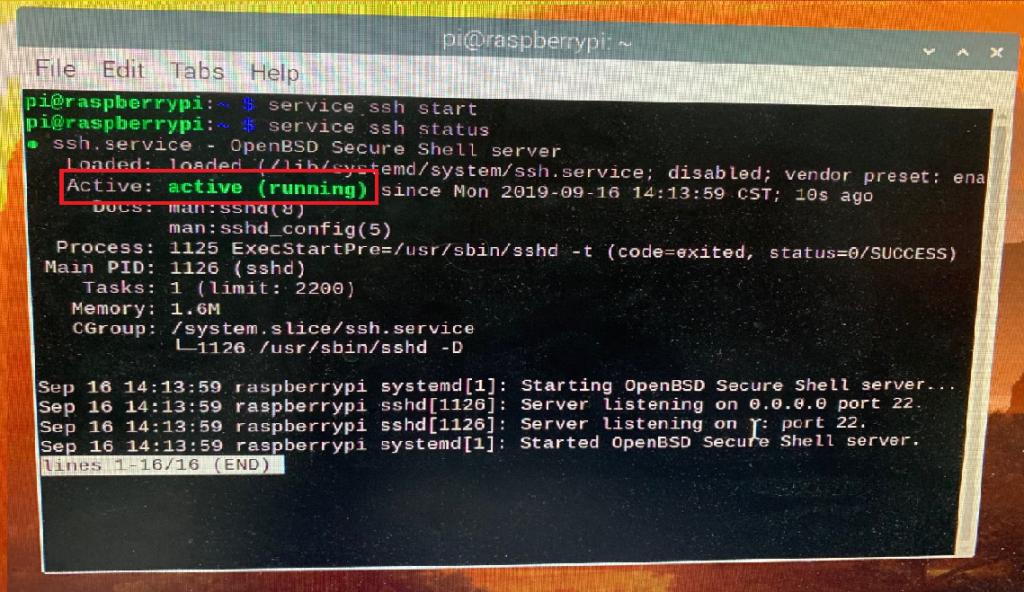
下載PuTTY
打上你的樹莓派IP,port:22可以不用動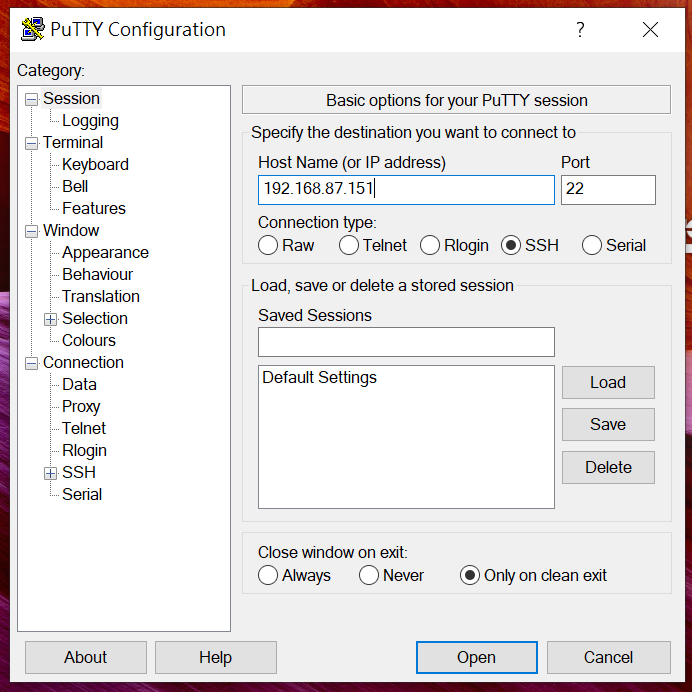
login as:你的樹莓派名稱
然後打密碼 連線ing...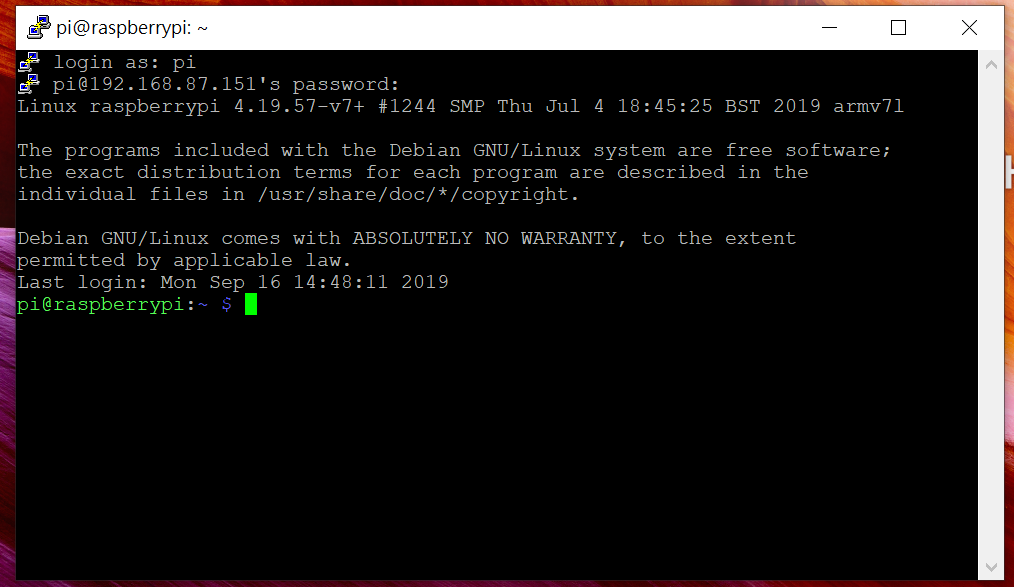
p.s.
以上是從noobs一直到SSH,但原本想嘗試的是下面這個QQ
在树莓派3上安装ROS


 iThome鐵人賽
iThome鐵人賽